Polar Style Drawing Robot
Fusion 360 • Engineering • IDE • Open CV • 3D Printing
INFO 5321 Class project | Page under construction
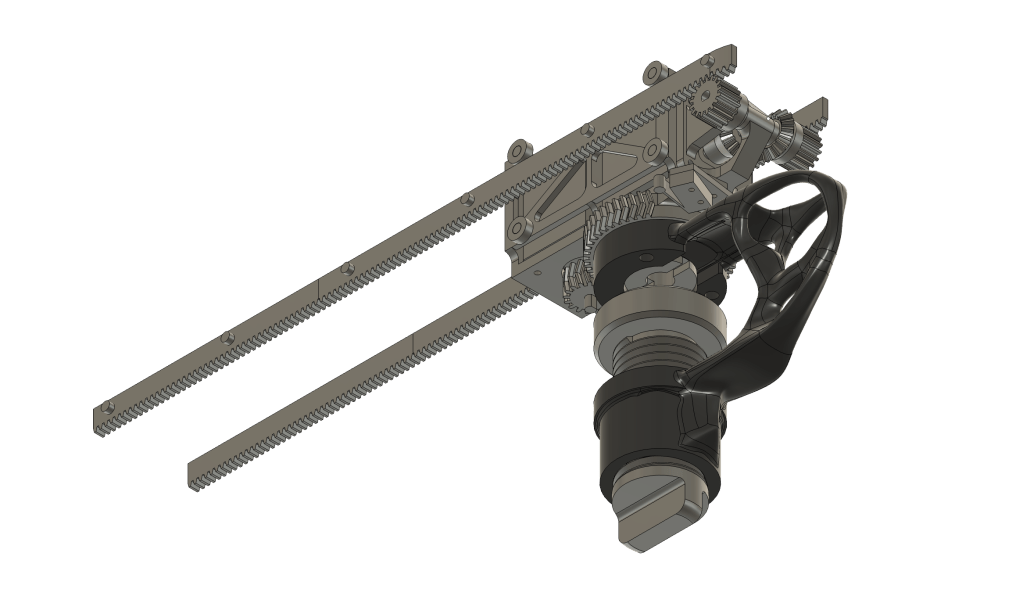
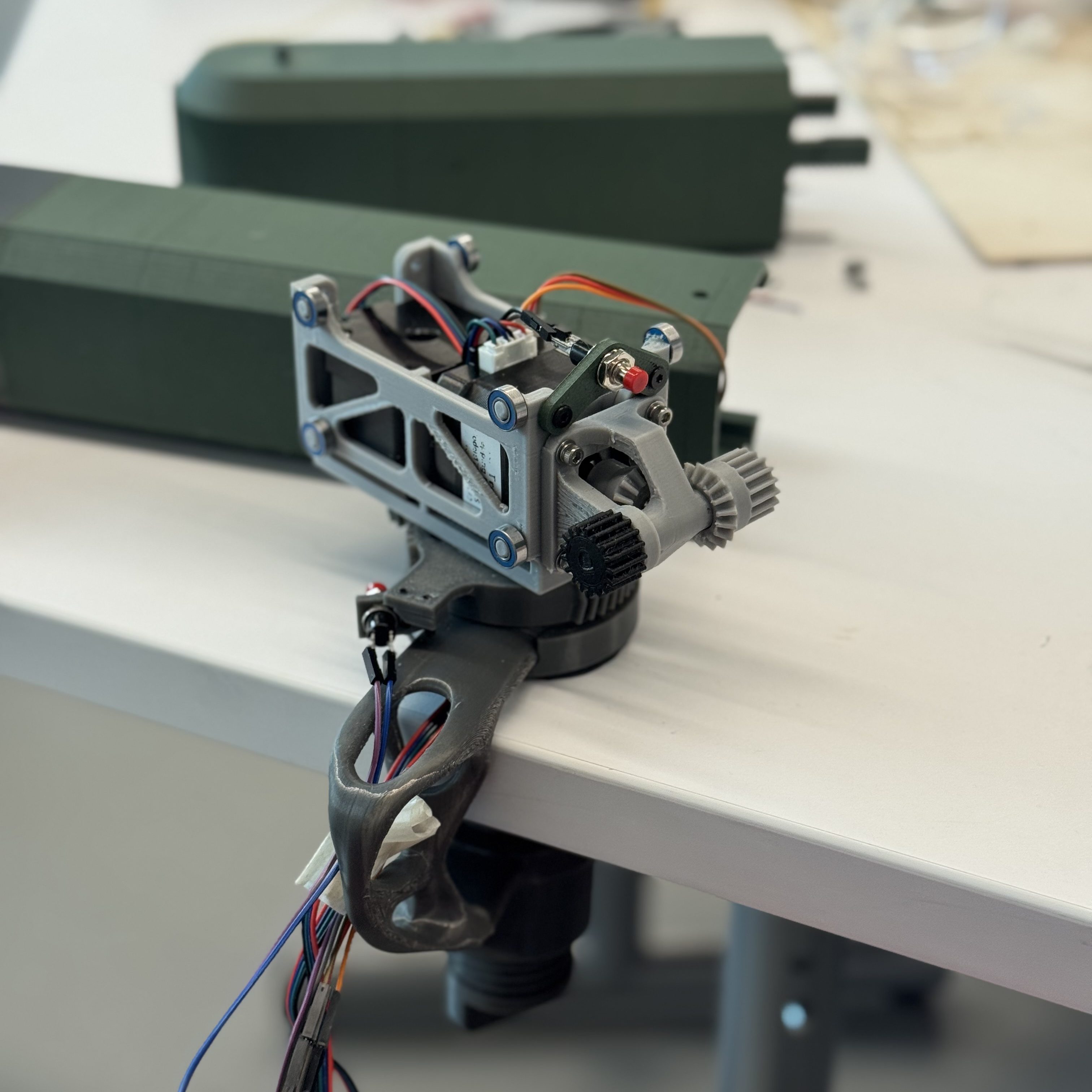
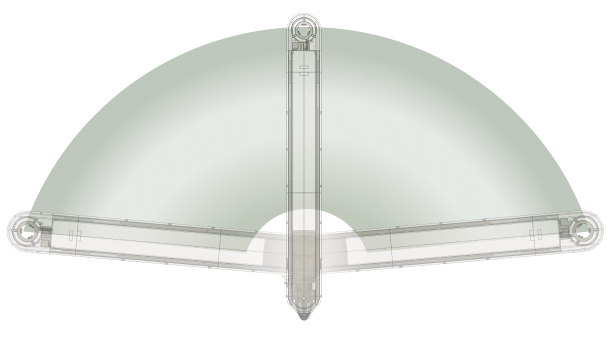
The polar drawing robot features a rotational arm and linear slide mechanism controlled by an ESP32 microcontroller, allowing for precise pen movement across a drawing surface
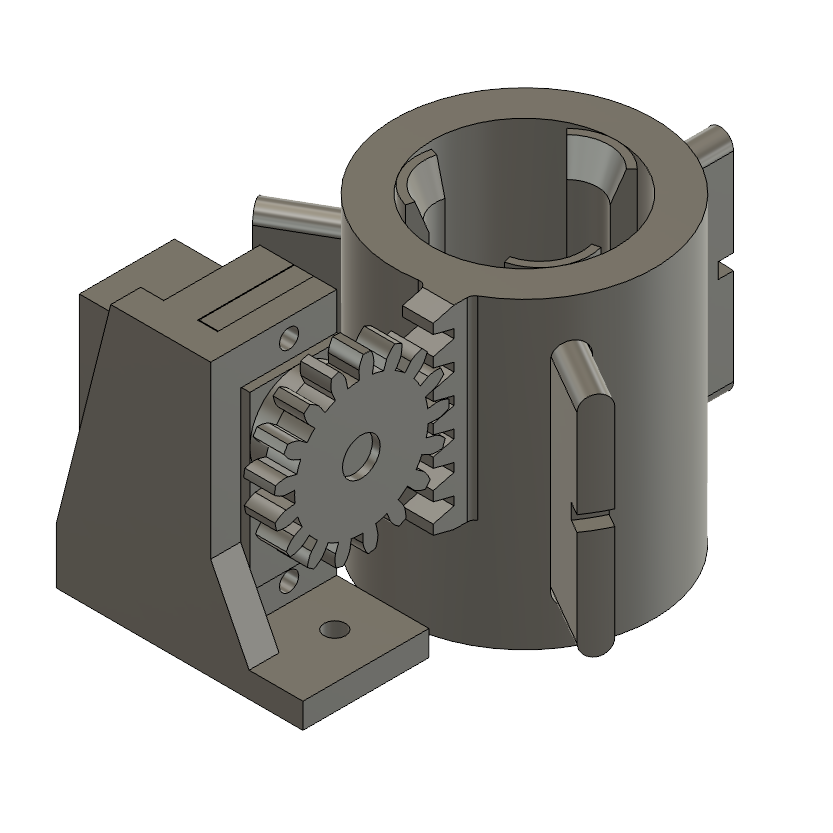
- Custom-designed polar mechanism
- Servo-controlled pen lift with auto fitting and snapping
- Coordinate transformation system that maps Cartesian to polar coordinates
- Automatic calibration
The system demonstrates practical application of inverse kinematics, computer vision processing, and human-machine interaction in a compact, engaging form factor. The project integrates Python OpenCV for image processing with embedded C++ programming for motion control.
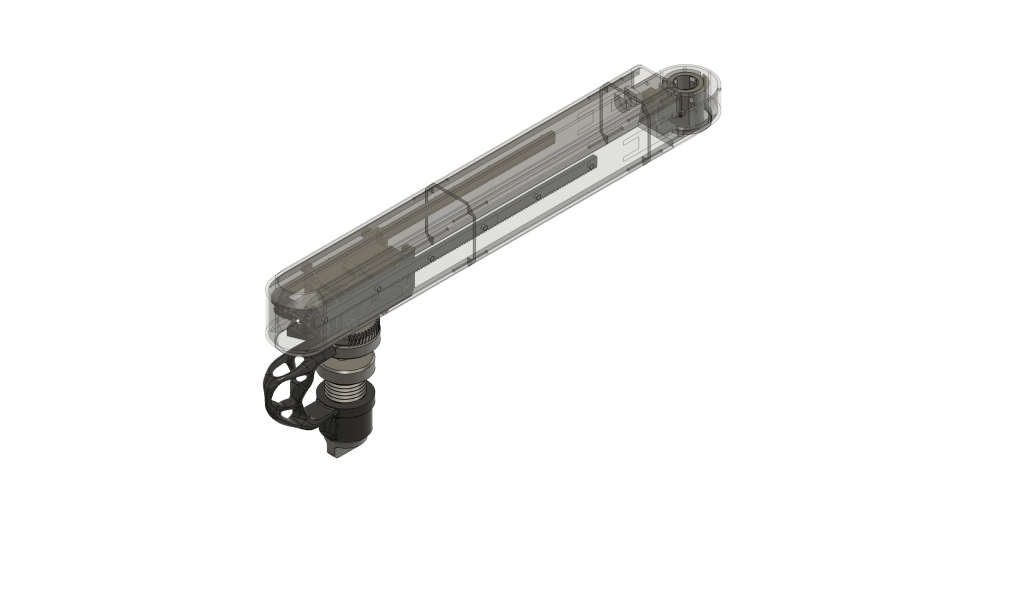

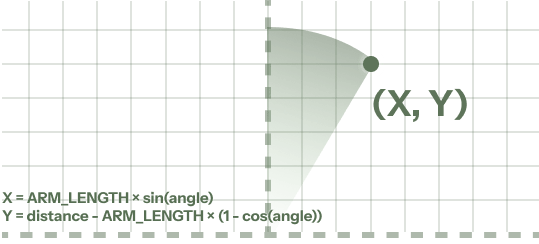
The robot converts standard Cartesian (x,y) coordinates into polar coordinates using mathematical transformations. These values directly control the two-axis system: a stepper motor rotates the arm to the calculated angle while a linear actuator extends to the distance.

